The first and most important question is: how do I get around corners?
The most important thing about cornering is to keep the line as straight as possible. The grey arrow in the illustration shows the best line to follow.
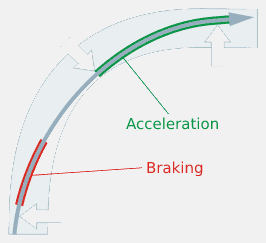
The next two important issues are deciding when to brake and when to accelerate. Braking must be completed before the turn starts, otherwise there is a high chance of skidding. Do not try to brake inside the corner. It is generally assumed that the start of acceleration should coincide with the moment when you pass the apex of the turn (the point where the trajectory touches the inside of the turn). In fact, you should start to accelerate when you feel that the kart is stable enough to do so and that speed can be increased without the risk of sliding. The ability to correctly determine when to start accelerating comes with experience and practice. All of the above applies to the trajectory in a single, simple turn of small steepness. However, all corners are different and the optimum trajectory for each type of turn is different. Below we will look at the different types of turns.
Fast corner
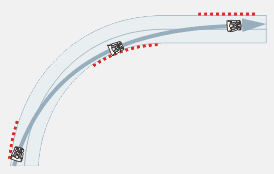
This type of turn is usually found on all karting tracks. The illustration shows the start of the turn, the apex and the exit along the straightest possible path. All this should be done as smoothly as possible, without any sharp turns of the steering wheel. A trajectory with a constant maximum possible turning radius usually proves to be the most efficient, both in terms of stability and speed.
Hairpin
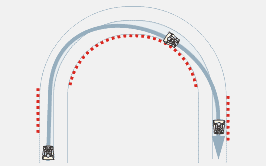
In a hairpin turn, the driver intentionally turns late with a deep entry (directing the car towards the outside of the turn). As a result of this manoeuvre, the remainder of the turn can be passed as the fast turn described earlier. It is for this purpose that the driver sacrifices speed in the initial phase of the turn, deliberately increasing the "steepness" of the entry, in order to straighten the trajectory as early as possible.
90 degree turn
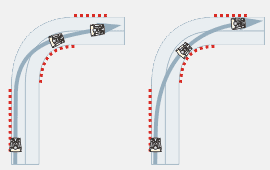
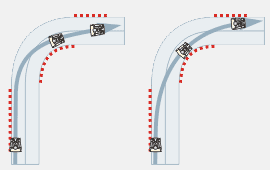
In this type of turn, the optimal trajectory depends on what follows the turn (a straight line, or another turn). The illustration on the left shows the way of a turn in which the driver passes the apex relatively late in order to be able to accelerate earlier.
The illustration on the right shows a trajectory with a constant and maximum possible radius of approach. The entry is much earlier, but it is not possible to start the acceleration until some time after the apex has been passed. This trajectory is smoother and is suitable for overtaking in a corner, as it implies later braking.
The illustration on the right shows a trajectory with a constant and maximum possible radius of approach. The entry is much earlier, but it is not possible to start the acceleration until some time after the apex has been passed. This trajectory is smoother and is suitable for overtaking in a corner, as it implies later braking.
Double Apex
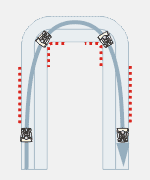
In some cases it is possible to find a trajectory that allows two consecutive turns to be joined by a short straight line as one turn. The exit trajectory of the first turn is at the same time the entry trajectory for the second turn.
However, in some cases it may be more efficient to enter the first turn deep, without touching the apex, and straighten the trajectory on the following turn.
However, in some cases it may be more efficient to enter the first turn deep, without touching the apex, and straighten the trajectory on the following turn.
Turning with increasing radius
This type of turn is characterised by the fact that after the apex the radius of the turn increases, as if the turn is "straightened out". The best way to do this type of turn is early apex, because after it there is an opportunity for significant straightening of the track due to the increasing radius. The most important thing is to find the 'golden mean' between the entry and exit moments, depending on the configuration of the particular turn. The final phase of such a turn can usually be regarded as a 'straight line' where intensive acceleration begins.
Turning with a decreasing radius
In this situation, the best solution is a wide entry and a relatively late apex. If there was a long straight before the turn, late braking will extend the distance where the car is still travelling at maximum speed. This trajectory will also give advantages in terms of turn times itself.
Before concluding the discussion on the best cornering trajectories, it should be noted that a series of corners, or bunches of corners, are several corners which are not separated by straights but which follow each other directly. Everything mentioned above is important to remember for these cases as well, but now one more principle should be introduced: in a bunch of corners followed by a straight line, the most important corner is the last one.
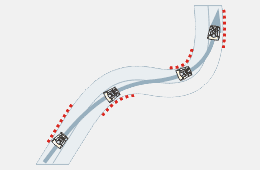
If the bunch consists of two corners, something has to be sacrificed in the first turn to ensure that the second turn is executed in the most optimal way, and that when exiting the last turn in the bunch on the straight, the acceleration can be started as early as possible. For example, in the case of an s-turn bundle followed by a straight line, it is necessary to sacrifice the entrance to the first turn in order to ensure a good entrance into the second turn, and a good exit from it. In other words, something must be sacrificed at the beginning of the bunch in order to enter the straight with maximum speed. In the reverse situation - when a bunch of corners is preceded by a big straight - you need to remember that the later the braking, the longer the car will move at the maximum speed that was gained during the straight. In other words, you should brake as late as possible and take the first corner as straight as possible. Time loss due to later acceleration after exiting the junction will still be less than the gain that you will get by passing the first corner after the straight line at the highest possible speed.
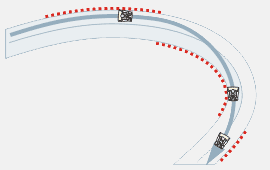
The illustration below shows the trajectory that aims for the best possible exit from the second hairpin. The first corner is driven wide in order to optimise the trajectory of the second corner - the earliest possible exit onto the straight and the start of acceleration.
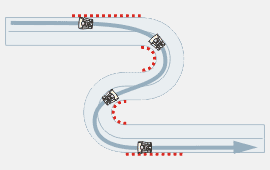
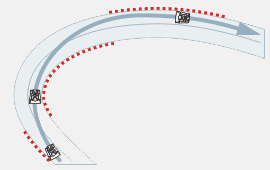
In the s-turn shown in the picture below, the exit from the bunch is the most important as the second turn is this fast turn with the exit to the straight. In the first right-hand corner is a late apex so that the second part of the bunch can be passed at the highest possible speed for this corner.
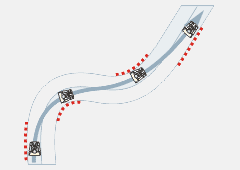
In the following case, on the contrary, the first part of the bunch is more important, as it is the fastest part of the bunch - the driver must pass the first part on the most straightened trajectory as far as the apex of the second turn. Braking does not start until just before the second corner, so the trajectory of the second corner will not be optimal.
Kart control at the clutch limit
There are two main controls on the kart - steering wheel and pedals. The steering wheel controls the front wheels and the pedals control the rear wheels. Consider separately the two types of turns - fast and slow.
Slow turns
In this type of turn it is better to have oversteer - i.e. some rear axle slip. By turning the rear axle at an angle greater than the turning radius, time can be gained in a slow turn. The slower the turn, the more accurately the kart must be "set". You must then pause before starting to accelerate - the unloaded rear wheels will start to slide. Once the desired skid effect is achieved, you need to start working the throttle and the steering wheel to regain full traction with the pavement.
Fast turn
In a fast turn, the opposite rule applies - rear axle sliding must be avoided, for two reasons:
1) It is very difficult to stop skidding in a fast corner
2) The speed and time loss caused by skidding is too high.
1) It is very difficult to stop skidding in a fast corner
2) The speed and time loss caused by skidding is too high.
In fast cornering, slight understeer is preferable. The higher the speed, the more accurate and smooth the steering must be. In order to maintain the balance of the kart, you must not enter a fast corner with the rear wheels unloaded (which occurs as a result of throttle reduction or braking): sliding of the rear axle at high speed can be instantaneous and the car will turn around. From the start of a turn, the driver must keep his foot on the accelerator pedal to prevent the kart from slowing down. Thus, after braking in a straight line before a turn, it is necessary to step on the throttle a few metres before entering the turn. By doing this, the rear wheels regain grip and, if the grip limit is crossed in a turn, the front wheels will be the first to start sliding. Slight understeer adds stability to the map in fast corners. If front wheel slip is too great, this can be eliminated by working on the throttle - a slight throttle reduction will restore grip to the front wheels, but sudden throttle reduction can cause the kart to skid.